Design of a low-cost, vision-based motion capture system for estimating the pose of rigid-body platforms
Description
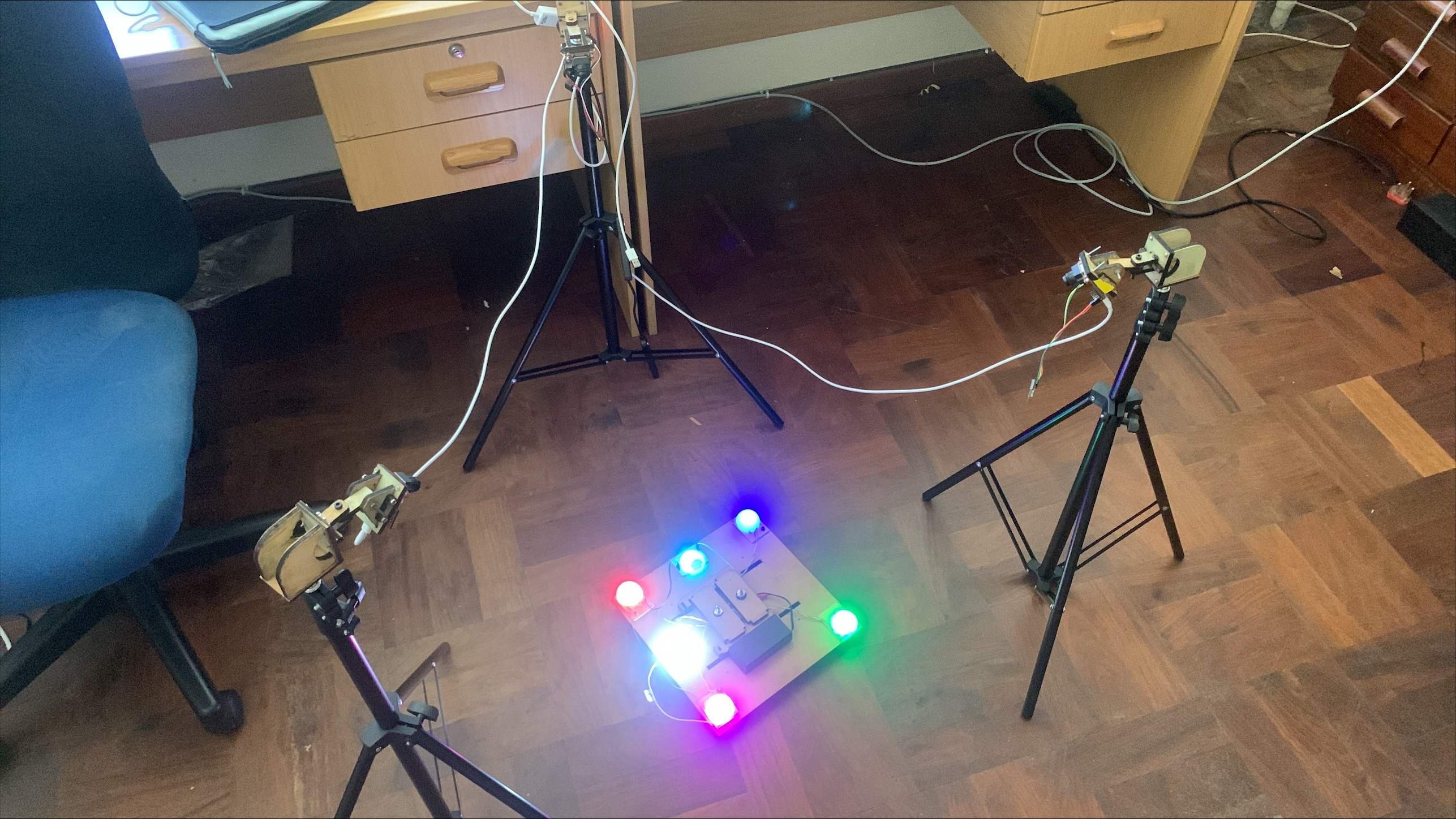
This project aims to design and create a motion capture system that utilises multiple cameras to estimate the position and pose of a moving object. The cameras are used to capture pixel coordinate data of certain features of the robot, then transmit the data to a base station which runs an EKF algorithm to estimate position, velocity, orientation and angular velocity.
Key skills/interests:
Mathematical modelling, machine vision, state estimation
Expected outputs:
1x MSc (Eng), 1x Journal/Conference paper in a leading publication.
Supervisor:
Arnold Pretorius