Mechanical design and implementation of a pole climbing robot for rapid surveillance
Description
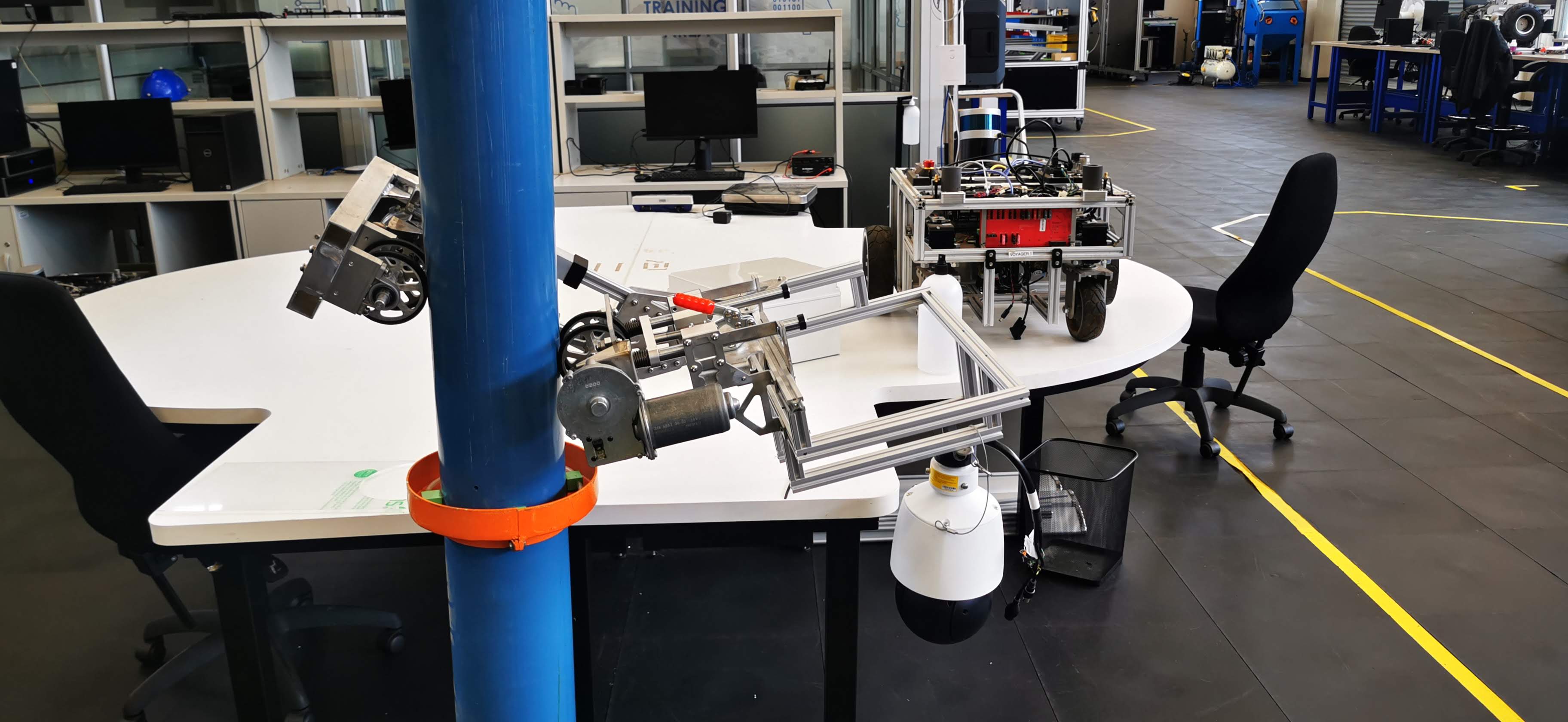
Due to the high prevalence and unpredictability of violent protest action in South Africa, a need has arisen for rapidly deployable surveillance. This project proposes an Automated Robotic Guardian for Urban Surveillance (ARGUS) platform, a wheeled pole-climbing robot, as a potential solution. The platform is designed to attach to and traverse up existing cylindrically shaped infrastructure, such as light posts, enabling easy deployment in urban environments. The robot is intended for various surveillance needs, such as public safety at events and periods of unrest or protest.
Key skills/interests:
Mechanical modelling and design, mathematical modelling, finite element analysis
Expected outputs:
1x MSc (Eng), 1x Journal/Conference paper in a leading publication.
Supervisors:
Arnold Pretorius, Stephen Marais, and Peter Bosscha